Some fun inverting matrixes.
Overview
I’m currently reading through Griffiths’ Particle Physics book, and problem 3.7 ask you to find the inverse of this matrix:
$$ \Lambda = \begin{vmatrix} \gamma & -\gamma\beta & 0 & 0 \\ -\gamma\beta & \gamma & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{vmatrix} $$
It’s been awhile since I took Linear Algebra, I wasn’t sure if it was even possible to easily invert a matrix. Something about \( det(A) \)?.
I figured it’d be a fun problem to solve pragmatically. So I jumped to wiki and found this boss equation:
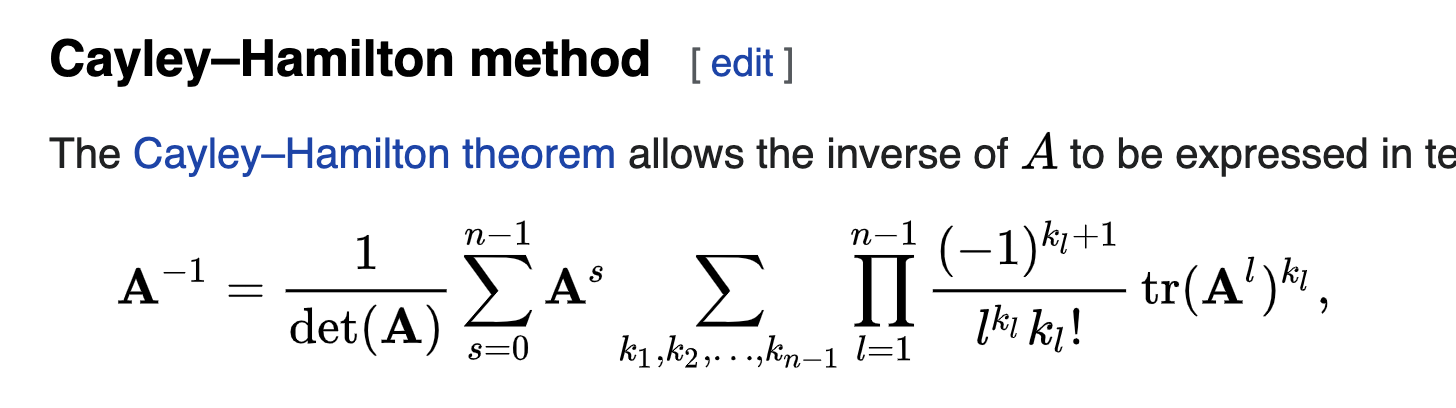
I’m not even going to try and replicated that in LaTeX. But it looks cool.
Off to coding!
Solution
Well the code is done: https://github.com/c0nrad/matInv/blob/master/matrix.ts
I ended up not using Cayley-Hamilton equation.
Turns out instead you can take the “adjugate” of the matrix and multiply it by the inverse of the determinate. This is related to Cramer’s Rule. (No idea what that is.)
The adjugate is the co-factor of the matrix (again, don’t really know what that is), but you can calculate it by taking a bunch of little determinates of the matrix. The determinate is sort of the area “scaling” factor of a matrix. Highly recommend the 3Blue1Brown video on the subject.
The code is kind of cool, it uses a recursive solution to find the determinate, and should work fine on larger matrixes (‘fine’ as in correct, not fast, it’s a slow algorithm). To do the recursive det’s I made up this matrix operator ‘splice’ that’ll return a new matrix without the specified row and col. No idea if it’s original, but it worked super well.
Solving the problem
Sadly, I should have spent 1 extra second thinking before I rushed to programming a solution. Programming won’t help me here (unless I was to use a symbolic system).
The solution to this problem plays on the relation of \( \gamma \beta \) in a pretty clever way.
(I tried to be clever with the numerical solver and substitute in primes and try to deduce the relation, but I quickly gave up.)
To invert between position vectors, you just switch the sign! It’s actually pretty neat that it works.
$$ x\prime = \gamma (x - vt) $$ $$ t\prime = \gamma(t-\frac{v}{c^2}x) $$
With:
$$ \gamma = \frac{1}{\sqrt{1-\frac{v^2}{c^2}}} $$
Then to switch back:
$$ x = \gamma (x\prime + v t\prime) $$ $$ t = \gamma (t\prime + \frac{v}{c^2} x\prime) $$
So the actual matrix of inversion is:
$$ \Lambda^{-1} = \begin{vmatrix} \gamma & \gamma\beta & 0 & 0 \\ \gamma\beta & \gamma & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{vmatrix} $$
And if you multiple them together, you get \( \bm{I} \)
Conclusion
Two seconds of thinking could have saved me 2hrs of programming. But it was a fun exercise. No ragrets.